基于双目视觉的场桥障碍物检测系统
项目背景
轮胎式集装箱门式起重机(RTG,Rubber Tyre Gantry)和轨道式集装箱门式起重机(RMG)(统称场桥)作为港口的大型机械,对港口作业起着至关重要的作用。其效率、安全、作业正确性对码头作业有着重要的影响。场桥主要承担集装箱和堆场内堆码的集装箱和集装箱水平运输设备(集装箱卡车或自动引导运输车AGV,运行于truck lane)之间的集装箱转移作业,其特点是作业环境复杂,危险系数大,司机视野不佳,且对司机依懒性高。场桥作业时,由于司机室位置较高,下方照明条件不理想,且存在吊具遮挡视野盲区,因此司机有时无法及时、完整观察到下方堆码集装箱的情况。
为了解决这个安全问题,本系统设计了一套基于双目视觉的障碍物检测方法,如果行驶路线上有人、车或其他障碍物,会检测出来并进行报警,大大降低安全隐患。

关键技术
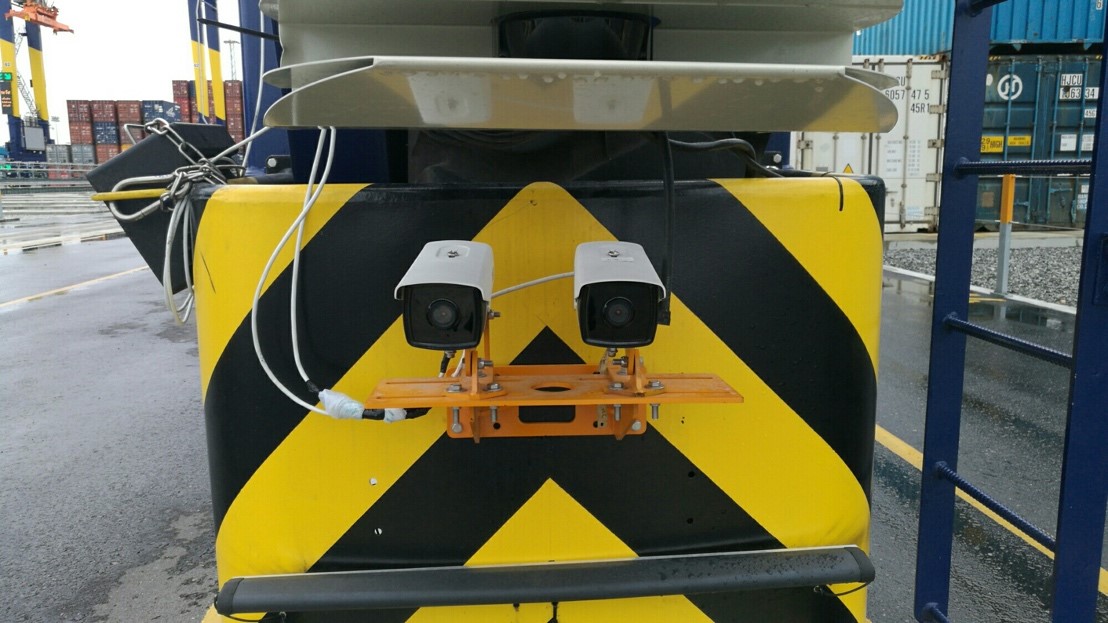
本系统先使用立体匹配使双目相机产生视差图,由得到的视差图再根据UV视差找出路面上的障碍物。同时利用深度学习中物体检测的方法进行另外一套障碍物检测,将二者效果融合。
产品优势
相较于主流的基于激光雷达的解决方案,本系统具有很大的优势:激光雷达的设备成本很高,一个32线的激光雷达大约售价2万美金左右,而64线激光雷达售价高达8万美金。本产品的传感器只需要两个摄像头。激光雷达的不能在不改动的情况下检测车道线,而本系统简单高效。同时本系统能够对障碍物进行分类,根据需求还可以对障碍物进行跟踪预警等。
